I am currently pursuing a degree in Mechanical Engineering at the University of Michigan, specializing in Robotics. My academic focus centers on control systems/ robot learning and manipulation.
Previously, I studied Aerospace Engineering at the University of Nottingham, where I had the privilege of being mentored by Prof. Erwin(Xin) Dong. Under his guidance, I began exploring robotics and gained foundational knowledge in this field.
🔥 News
- 2024.08: 🎉 I’m heading to the University of Michigan to pursue my master’s degree, and I’m eager to explore more about robotics. Hoping to expand my knowledge and skills in this fascinating area!
📝 Projects
SLAM/Path Planning/Control
BotLab [code] [video1] [video2] [video3]
- BotLab is a course project for the UMich ROB550 - Robotic Systems Lab. This project presents an autonomous mobile robot system implemented on the differential drive MBot platform equipped with 2D LIDAR, wheel encoders, an IMU, and a camera. The system achieves precise motion control using PID feedback and a carrot-following algo- rithm, robust mapping via particle filter-based SLAM with occupancy grids, and autonomous exploration through A* path planning and frontier-based strategies. Additionally, a YOLO model was trained to detect cones and blocks for task execution. This work achieved first place in the final competition of the class.
Kinematic/CV
- Armlab is a course project for UMich ROB550 - Robotic Systems Lab. In this project, an RGB-D camera was used to detect the size, color, position, and height of blocks. The project also involved implementing both forward and inverse kinematics for a 5DOF robotic arm, which was then used to perform a series of tasks. This work achieved first place in the final competition.
Embedded System/Communication
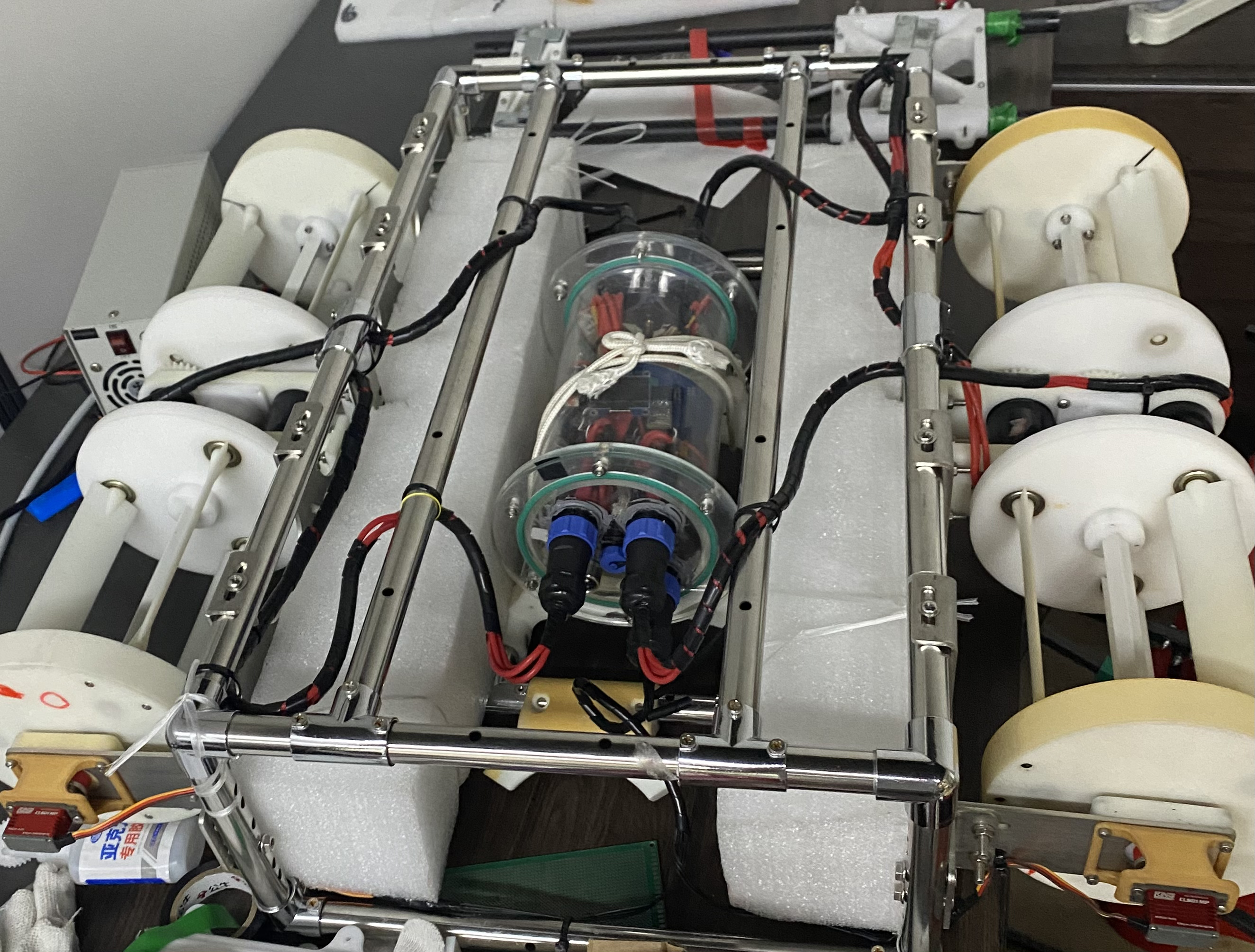
Cycloidal Propeller [video]
- This underwater robot can move in all directions, just like McNamara wheels. This project involves achieving directional and depth-controlled movement by utilizing data from the IMU and depth sensor, along with PID control.
Algorithm
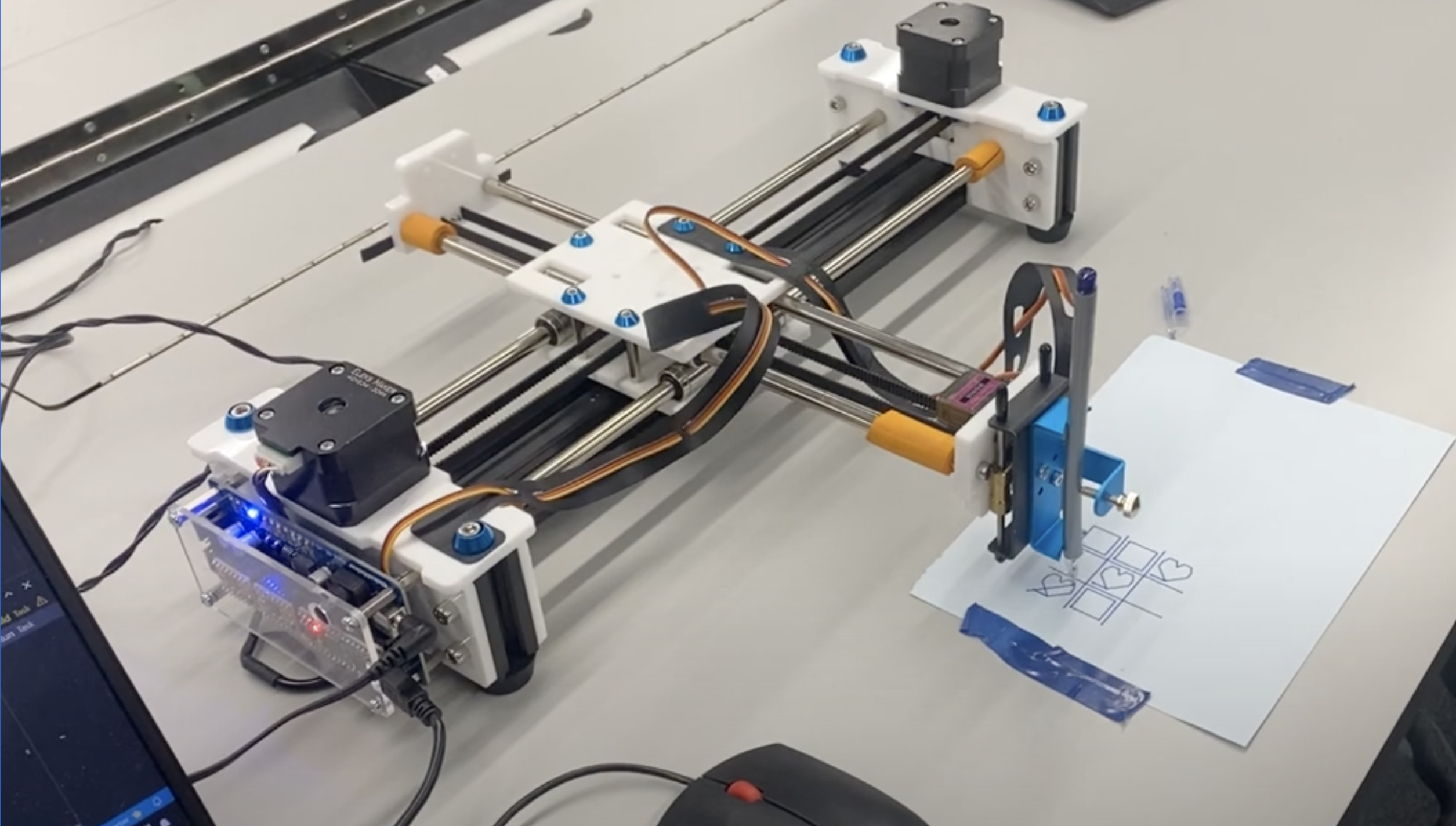
- The drawing robot is capable of executing Tic Tac Toe games between two players through a command-line interface. Players can select grid sizes and choose their unique patterns from a list. The robot autonomously determines the winner and visually highlights the victory by drawing a line through the matching sequence.
Design

Swirling Adhesion [video1] [video2]
- Designed and validated a non-contact swirling adhesion system for both air and underwater environments. Demonstrated that this device can generate strong suction on even rough surfaces while maintaining minimal tangential forces. This unique feature makes it highly suitable for robotic applications, enabling robots to adhere strongly to a wide range of surfaces.
🎖 Honors and Awards
- 2024.7, Head of Department Award, University of Nottingham, UK
📖 Educations
- 2024.08 - now, M.Sc, Mechanical Engineering, University of Michigan-Ann Arbor, Ann Arbor, USA.
- 2022.09 - 2024.06, B.Eng, Aerospace Engineering, University of Nottingham, Nottingham, UK.
- 2020.09 - 2022.06, B.Eng, Aerospace Engineering, University of Nottingham, Ningbo, China.
💻 Internships
- 2024.06 - 2024.08, Research Intern, Marine Robotics Research Center, Huzhou Institute of Zhejiang University, HuZhou, China.
- 2022.06 - 2022.09, Research Intern, Ningbo Ostatus Machinery Technology Co., Ltd., Li Dak Sum Incubator, Ningbo, China.
- 2021.09 - 2022.06, Sports Intern, UNNC Sports Center, Ningbo, China.
🧗 Hobbies
- 2022.10 - 2024.05, Member, University of Nottingham Climbing Competition Team.
- 2021.09 - 2022.06, Leader, University of Nottingham Ningbo China Excel Climbing Team.
- 2021.06 - 2022.06, President, Climbing Association of Nottingham Ningbo.
- Junior Outdoor Instructor of China Mountaineering Association.